1. Различити структурни принципи
Принципи дизајна ова два модела су различити, што резултира различитим структурама за обезбеђивање синхронизације са обе стране клизача за савијање. Машина за савијање торзионе осе користи торзиону осу за повезивање леве и десне закретне шипке како би формирала торзиону осу приморавајући механизам за синхронизацију да се помера горе и доле по цилиндрима са обе стране, тако да је машина за савијање синхронизације торзионе осе механичка метода присилне синхронизације , а паралелност клизача се не може аутоматски проверити аутоматско посредовање.
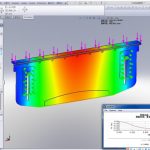
Електро-хидраулична синхрона машина за савијање је да угради магнетну (оптичку) вагу на клизач и зидну плочу. Систем нумеричке контроле може анализирати синхронизацију обе стране клизача кроз повратну информацију магнетне (оптичке) скале у било ком тренутку. Ако дође до грешке, систем нумеричке контроле ће се подесити преко пропорционалног електро-хидрауличног серво вентила да би синхронизовао ход на обе стране клизача. Нумерички систем управљања, група хидрауличких контролних вентила и магнетна скала чине контролу затворене петље са повратном спрегом електро-хидрауличке машине за синхрони савијање.

2. Прецизност
Паралелност клизача одређује угао радног предмета. Синхрона машина за савијање са торзионом осовином механички одржава синхронизацију клизача, без повратне информације о грешци у реалном времену, а сама машина не може извршити аутоматска подешавања. Поред тога, њен капацитет делимичног оптерећења је лош (машина за синхрони савијање са торзионом осовином користи торзиону осу да примора механизам за синхронизацију да помера цилиндре са обе стране нагоре и надоле. Ако ће дуготрајно делимично оптерећење проузроковати деформацију торзионе осе .), електро-хидраулична синхрона машина за савијање је систем кроз пропорционални електрични. Група вентила за течност контролише синхронизацију клизача, а магнетна (оптичка) скала пружа повратну информацију о грешци у реалном времену. Ако дође до грешке, систем ће се подесити кроз пропорционални вентил како би одржао синхронизацију клизача.
3. Брзина
У раду машине постоје две тачке које одређују њену брзину рада: (1) брзина клизача, (2) брзина залеђа, (3) корак савијања.
Синхрона машина за савијање са торзијском осовином користи цилиндар 6:1 или 8:1, који је спор, док електро-хидраулична машина за синхрони савијање користи цилиндар 13:1 или 15:1, који је брз. Због тога су брзина брзог спуштања и повратна брзина електро-хидрауличне машине за синхроне савијање много већа од торзионе машине за синхрони савијање.
Када се клизач машине за синхроно савијање торзијске осе помера надоле, иако брзина има функције брзог доле и успоравања, брзине брзог спуштања и повратка су само 80 мм / с, а брзо и споро пребацивање није глатко. Брзина кретања задњег мерача је само 100 мм/с.
Ако радни предмет треба да се савија у више корака, сваки процес синхроне машине за савијање са торзионом осовином мора бити подешен засебно, а процес обраде је веома тежак. Међутим, електро-хидраулична синхрона машина може подесити и сачувати процес сваког корака преко рачунара и може се континуирано радити, што у великој мери побољшава брзину корака савијања и побољшава ефикасност рада.
Када се клизач електро-хидрауличке машине за синхроно савијање спусти, брзина има функције брзог и успоравања. Брзина спуштања и враћања може да достигне 200 мм/с, а брза и спора конверзија је глатка, што може значајно побољшати ефикасност производње. Истовремено, брзина трчања задњег мерача достиже 300 мм/с.
4. Снага
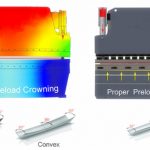
Због сопственог дизајна, торзиона синхрона машина за савијање не може се савијати под ексцентричним оптерећењем. Ако је дуже време савијен под ексцентричним оптерећењем, то ће довести до деформације торзијске осовине. Електро-хидраулична синхрона ЦНЦ машина за савијање нема такав проблем. И1 и И2 осе на левој и десној страни раде независно, тако да се може савијати под делимичним оптерећењем. Ефикасност рада електро-хидрауличне машине за синхрони савијање може бити еквивалентна машинама за синхроно савијање са две до три торзионе осе.
Повезани производи
 Принцип рада и састав ЦНЦ машине за савијање кочнице
Принцип рада и састав ЦНЦ машине за савијање кочнице- Зашто додати систем компензације у машину за савијање кочница за пресовање
- Поређење и избор преса кочница ЦНЦ система
- 4 корака за упознавање Е21 систем ЦНЦ савијача лима
- Како направити компензацију угиба за ЦНЦ савијач лима
- Најпродаванији хидраулични притисак хидраулична радионица преса хидраулична преса тон хидраулична
- Кина 40 тона прес кочница
- Правила безбедног рада хидрауличне машине за преса
- ВИЛА ефикасно решење за савијање средњих и дебелих плоча
- Уобичајени механички кварови и одржавање машина за савијање прес кочница